Introduction
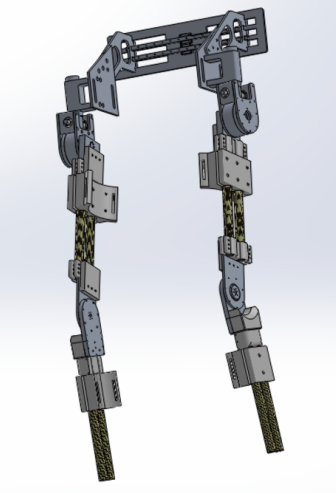
*Early CAD design
Exo is a newly launched project team within the Biomechatronics student deisign team at the University of Waterloo. I believe an engineer should create solutions that truly help people, and working in healthcare is one of the most direct ways to do so. For that reason, exoskeleton has always a project I wanted to partake in. When Exo was launched during my first year, I joined the team right away and took the initiative to lead the software team. Other leads and I are building the team structure from groud up.
In Exo, we are building a 2-DOF soft exoskeleton to participate in ACE competition.
Systems Overview
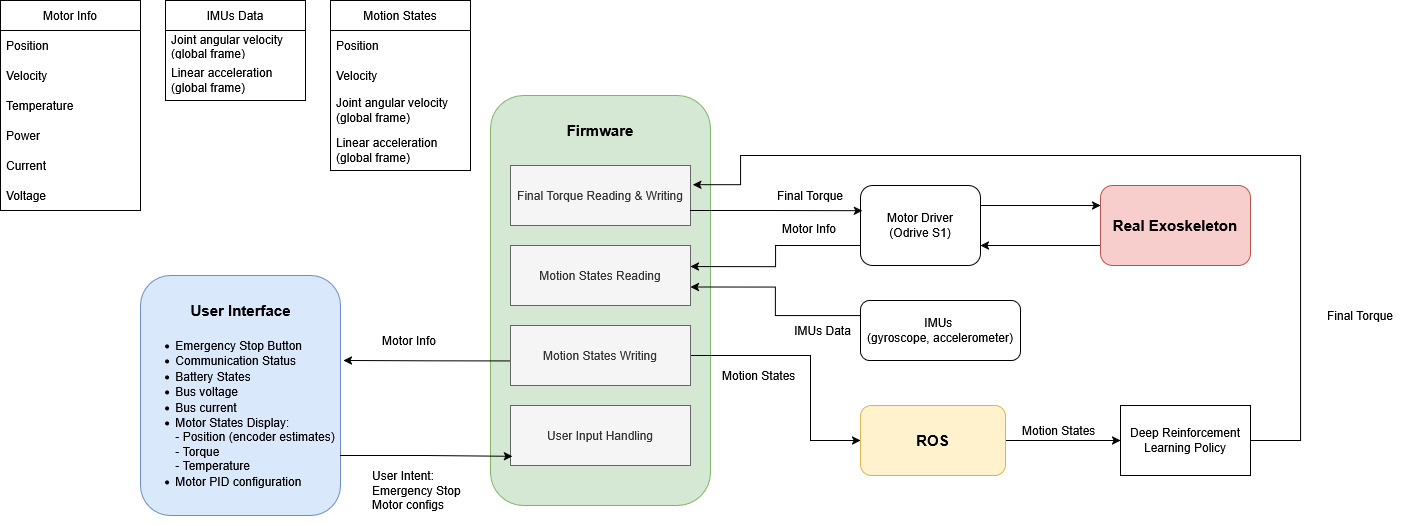
Our exoskeleton integrates firmware, user interface, and control systems to provide adaptive motion assistance. The software stack communicates with motor drivers and IMU sensors over CAN to collect user's motion in real-time. The user's motion data is then sent to user interface for monitoring and Robot Operating System (ROS) where we run deep reinforcement learning (DRL) policy for assistive control.
Right now, I am focusing on system integration, ensuring deterministic timing and meeting real time safety constraints.
Firmware Structure
The firmware is the central system that acts as the middleware connecting other systems. It directly interfaces with hardware components and handle data transmission and communication between sytems.
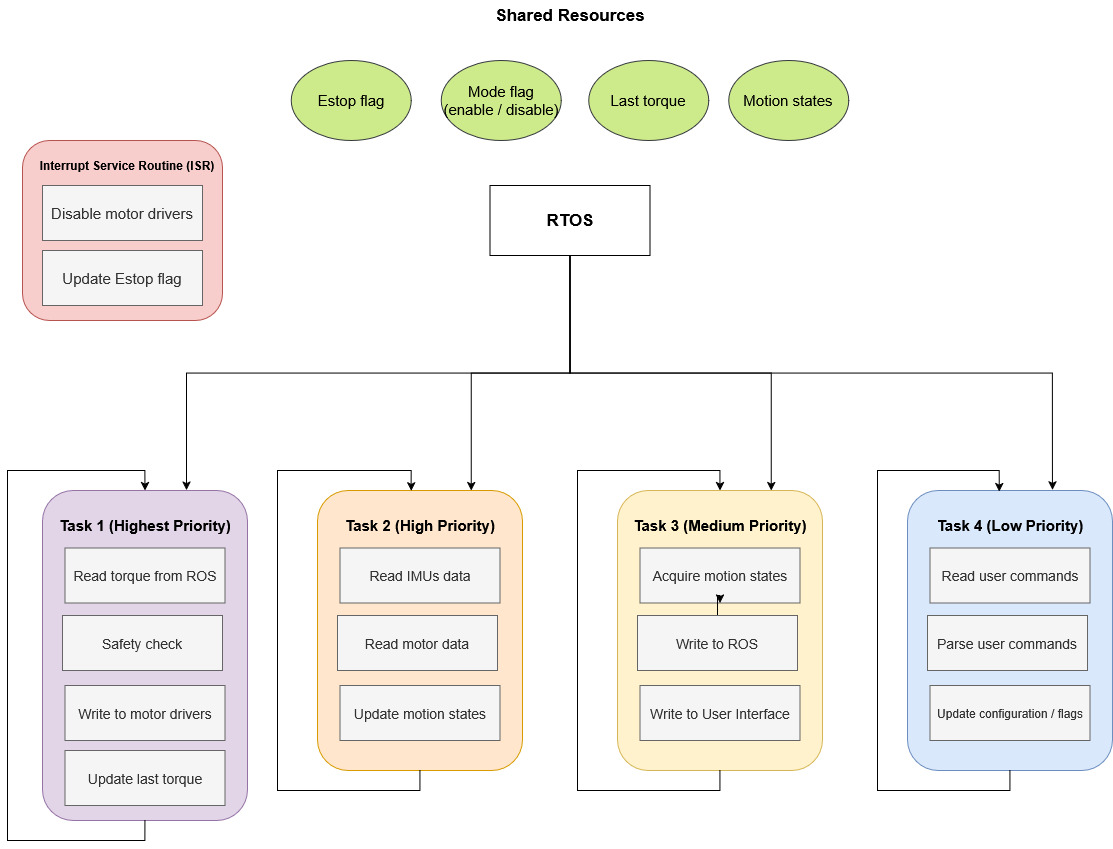
We use a Real Time Operating System (RTOS) to coordinate multiple tasks by assigning priorities and enforcing deterministic scheduling rates. The highest priority task is the motor control loop. It receives the commanded torque from the reinforcement learning policy, applies safety constraints and torque limits, and writes the final command to the motor drivers. This control loop runs at 500 Hz to ensure stable and smooth motion control.
Research on Assistive Control
We are developing a motion assistance system that adapts to different users and movement patterns while handling frequent motion transitions. Our research compares two approaches:
Method 1: Deep Reinforcement Learning (Model-Free)
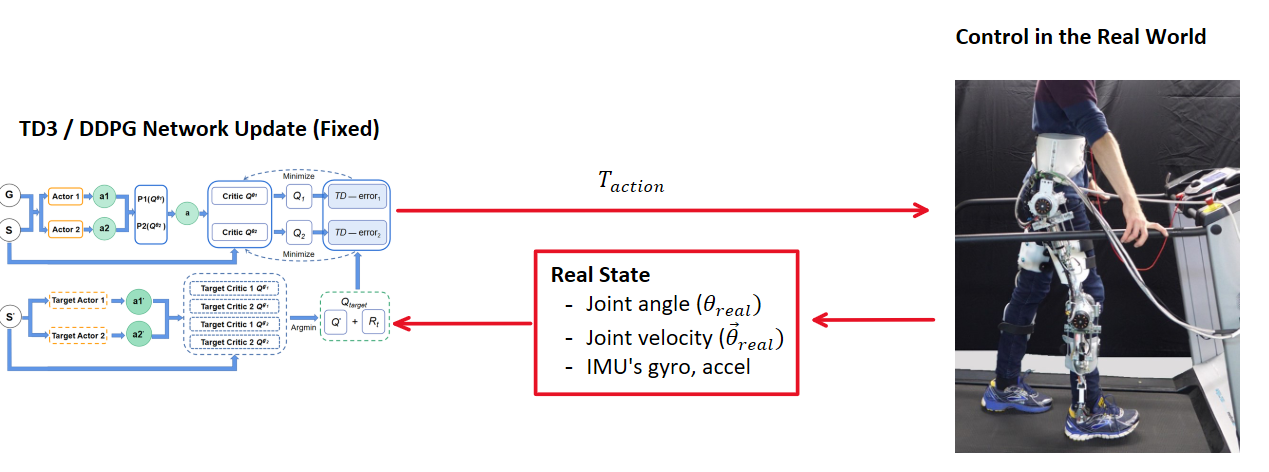
We plan to use DRL to create a model-free control system that generalizes across users and movement types. This approach simplifies control logic and improves robustness to transitions, enabling the exoskeleton to adapt dynamically to various gait patterns. We are implementing this using NVIDIA Isaac Sim, which enables over hundreds of parallel simulation. This accelerates the training process.
Our DRL Strategy:
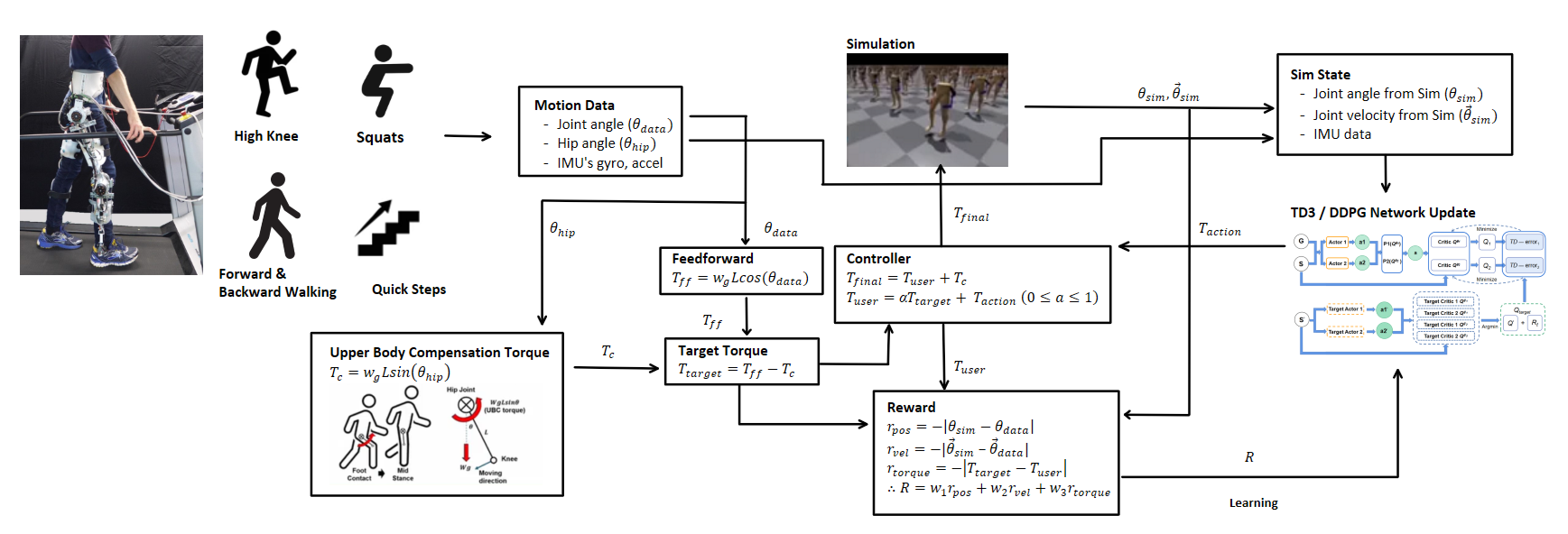
Control After Depolyment:
Method 2: Fixed-Model based Approach (Kalman Filter)
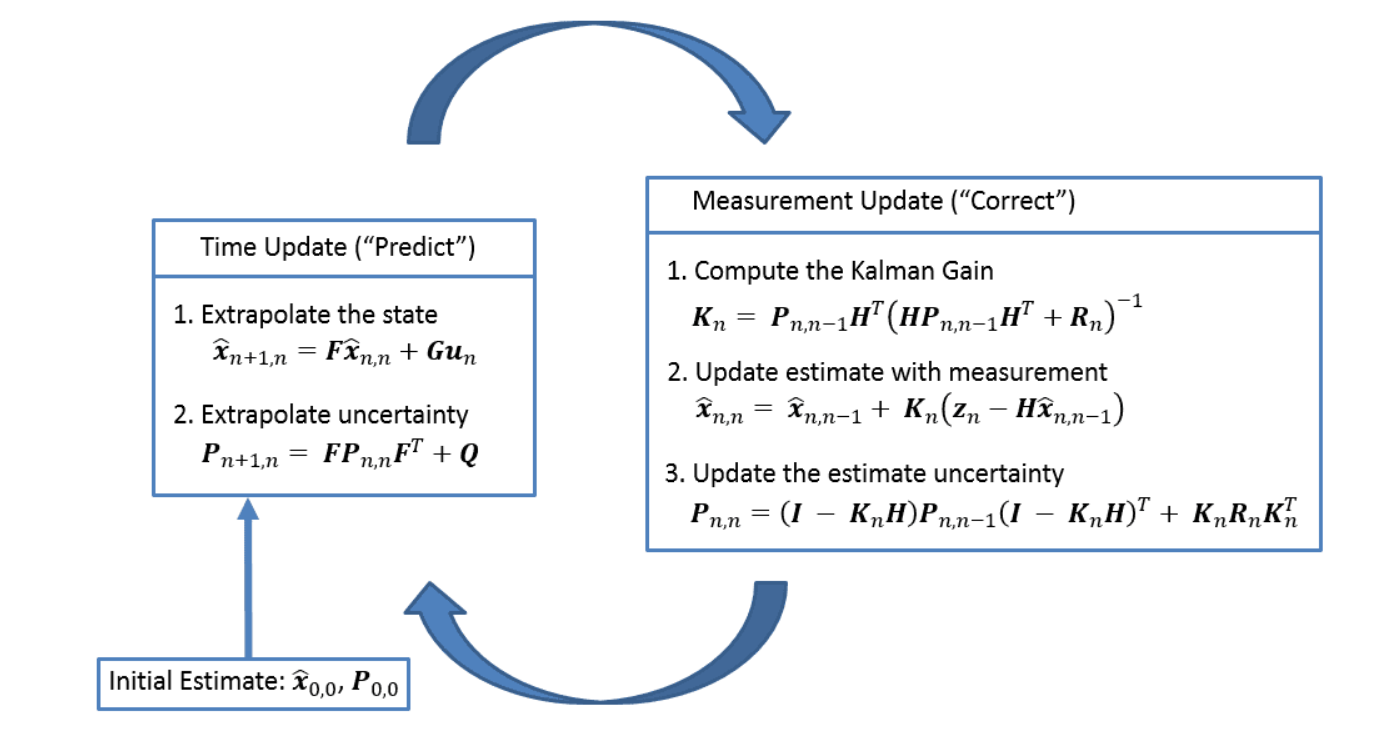
Initially, we explored a model based approach using Kalman filtering to estimate user motion from sensor data under a fixed system model. While this method is computationally efficient and relatively simple to implement, it struggled to handle frequent gait transitions and inter user variability.
After completing the project, we plan to conduct further research on the performance differences between model based and model free control strategies for exoskeleton systems, particularly focusing on user adaptability, movement variability, and transition handling.