Introduction
I was a part of FIRST Robotics Team 3683 for 3 years, througout my highschool. Participating in FIRST Robotics Competition (FRC) helped me develop versatile skills across software, electrical, and mechanical, but my primary focus was robotics programming.
Within the software team, I programmed systems, such as a swerve drive using holonomic drivetrain kinematics and other subsystem logics like:
- score elevator
- intake
- shooter
- climb
- turret
and many more.
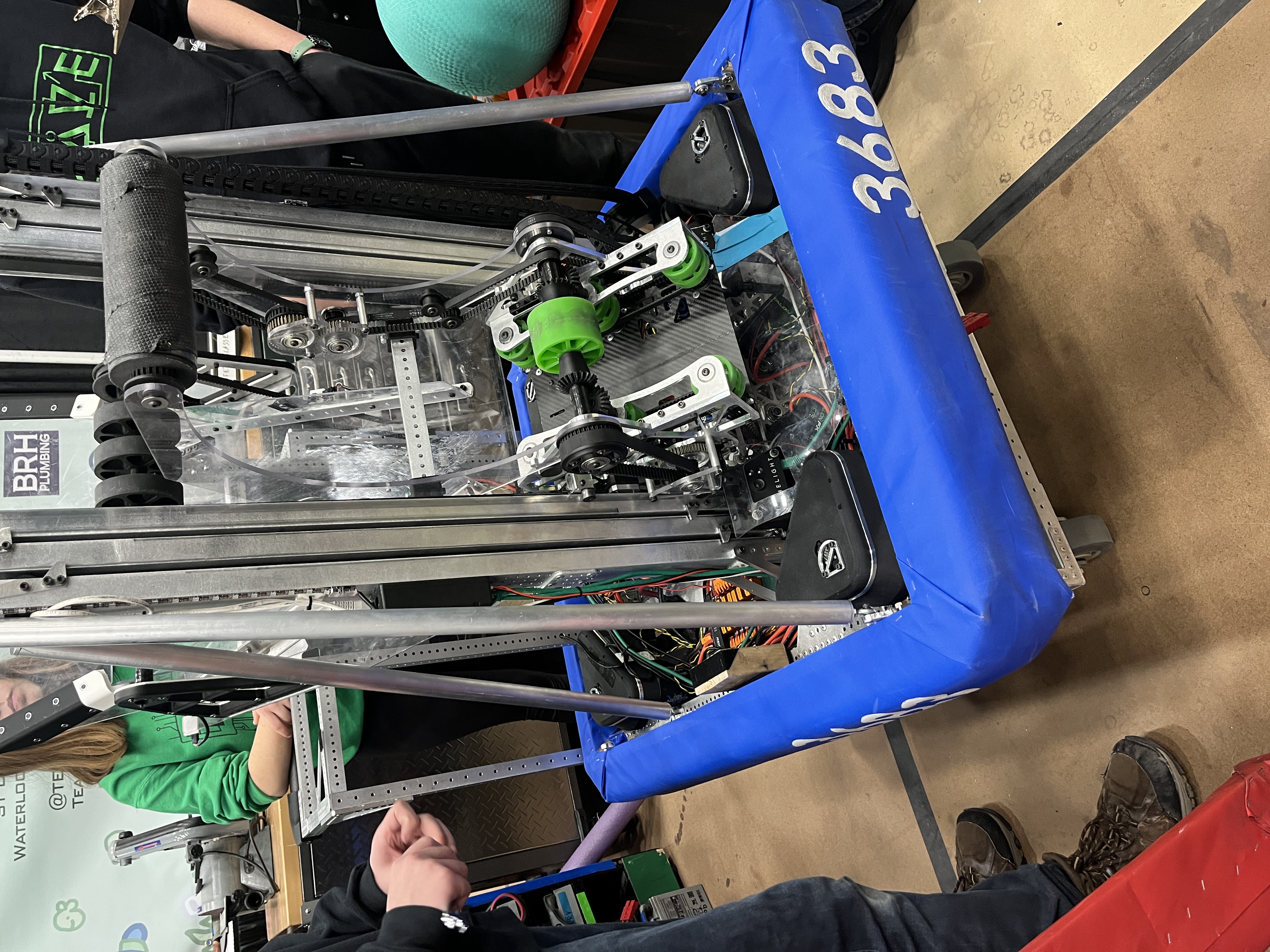
2025 Robot Photo
Autonomous Trajectory Planning
My most impactful work was writing autonomous trajectory routines maximizing scoring during the 16-seconds autonomous period of a match. This experience got me opportunities to work extesively with control theories, sensor feedback, and computer vision.
Auto Test
Auto during a match
Drive station

This was the control interface our team used for debugging and during matches. It displays the live feeds from two Limelight cameras mounted on the robot chassis. Using these cameras, we detected AprilTags and identified the tag closest to the robot, allowing it to adjust its alignment and accurately score a game piece on the nearest reef.
Team Recognition
Thanks to the dedication of every team members, our team consistently ranked among the top performers in Canada and internationally.
In 2025, our team advanced to the Provincial Finals for the first time in over a decade, finishing 3rd in Canada and 34th worldwide. Although we were unable to attend the World Championship due to funding limitations, this season marked a major milestone for the team.

2025 Robot Reveal
I’ll wrap up this post with our sick 2025 robot reveal video.